- シーンから探す
-
贈る相手から探す
- 本
- 楽器/器材
- その他
- オートバイパーツ
- 映像機器
- 雑貨・小物
- ブルーレイ
- フィギュア
- ヘアケア
- メンズファッション
- 収納家具
- 年中行事用品
- 楽器/器材
- その他
- 本
- 外装、車外用品
- タイヤ、ホイール
- 武道、格闘技
- アンティーク/コレクション
- タイヤ、ホイール
- その他
- 写真
- その他
- 美術品
- 生活家電
- アウトドア
- スマホアクセサリー
- バイク
- 香水
- フィルムカメラ
- 漫画
- 飲料
- その他
- その他
- 折りたたみ自転車
- マウンテンバイク
- ホンダ
- 美術品
- 食品
- DVD/ブルーレイ
- 帽子
- オーディオ機器
- その他
- ネックレス・ペンダント
- その他
- 漫画
- オーディオ機器
- 文房具/事務用品
- 生活家電
- トップス
- 楽器/器材
- クロスバイク
- フィッシング
- カテゴリから探す
- おまとめ注文・法人のお客様
人気 DYNAMIXEL XH430-W350-R
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
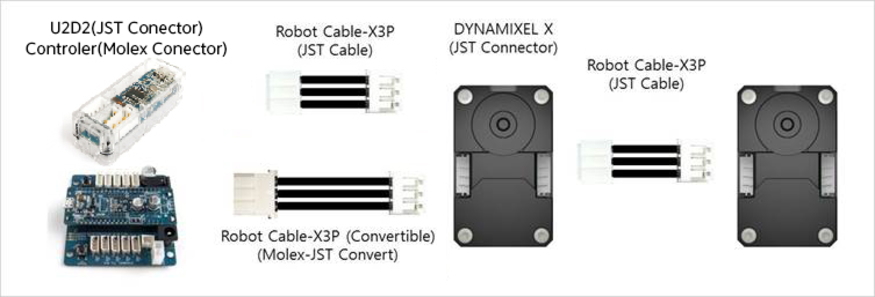
【様々なケーブル接続方法】

【性能比較】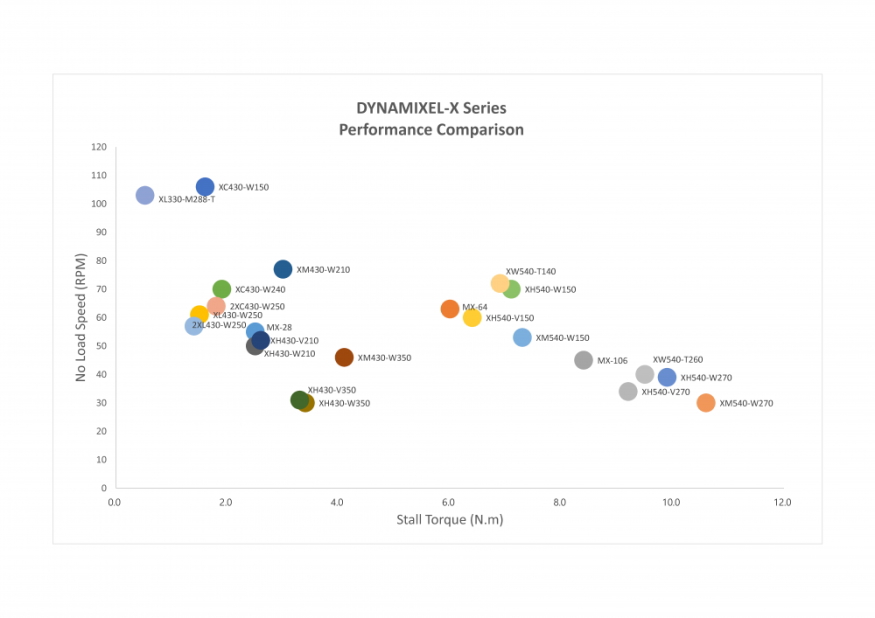
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
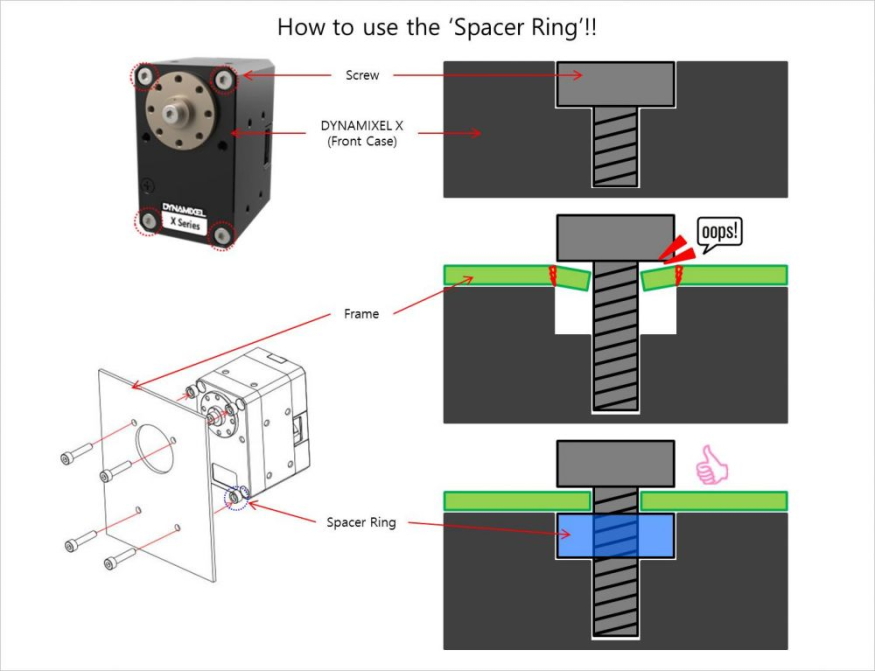
" target="_blank" tabindex="-1">モデル, 12V仕様, コアレスモータ搭載, 金属ギヤ<br><br>【特徴】<br>DYNAMIXELは、DCモーター+コントローラー+ドライバー+センサー+減速機+ネットワークを1つのDCサーボモジュールに完全統合したロボット専用スマートアクチュエーターです。DYNAMIXEL XLシリーズは、非接触磁気エンコーダーと中空バックケースアセンブリ構造により、360度の制御モードを可能にする新機能を採用しています。XLシリーズはXM430、XH430と同様の機構構造を持ち、それぞれのモデルと互換性があります。<br><br>1. さまざまな動作モード(速度制御、位置制御、拡張位置制御、PWM制御)<br>2. スムーズな動作計画を実現するプロファイル制御<br>3. 中空ケースによりケーブルストレスを最小限に抑える (3方向配線)<br>4. ケースに直接ネジを取り付ける(ナットインサートなし)<br>5. 電流低減による省エネ<br><br>【パッケージ内容】<br>・XH430-W350×1<br>・HN12-N101×1<br>・Teflon Washer (for Horn Assembly)×1<br>・Robot Cable-X4P 180mm×1<br>・Robot Cable-X4P(Convertible) 180mm×1<br>・Wrench Bolt (WB M2.5*4)×16<br>・Wrench Bolt (WB M2.5*6)×1<br>・Wrench Bolt (WB M2*3)×10<br>・Spacer Ring×8</p><br><BR><b><font SIZE=) 【対応製品】
【対応製品】
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
" alt="人気 DYNAMIXEL XH430-W350-R">
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" target="_blank" tabindex="-1">
コントローラ:OpenCR1.0
インターフェース:USB2ダイナミクセル、U2D2
【工場出荷時の設定】
ID:1
ボーレート:57600bps
(環境に応じてIDやボーレートなどの各種設定を変更可能)
【様々なケーブル接続方法】
【性能比較】
【注意】
中空ケースを使用したDYNAMIXEL-Xシリーズのケーブルアセンブリバックケースを組み立てる前に、絡まったケーブルを整理してください。ケーブルが絡まった状態でバックケースを組み立てないでください。ケーブルが絡まるとケースに押しつぶされ、通信エラーの原因となることがあります。
中空ケースにケーブルを2本通して使用すると、ケーブルが損傷します。中空ケースには 1 本のケーブルのみを使用してください。
DYNAMIXEL-Xシリーズは、安全で信頼性の高い通信を実現する新しい金メッキJSTコネクタを採用しました。従来のDYNAMIXELに使用されていたコネクタはMolexです。
OpenCM または USB2Dynamixel 経由で DYNAMIXEL-X シリーズ アクチュエータを制御するには、パッケージに同梱されている JST-Molex 変換ケーブルを使用してください。
ただし、XL430 モデルには Molex-JST 変換ケーブルは付属しません。
JSTコネクタに対応したコントローラやインターフェースを使用する場合は、変換ケーブルをご購入ください。
| Controller Model | Controller Connector | Cable | DynamixelX Connector | Dynamixel Communication |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| U2D2 | JST (3P, 4P) | Robot Cable-X3P (by length) | JST-3P | TTL |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | Molex (3P, 4P) | Robot Cable-X4P 180mm (Convertible) | JST-4P | RS-485 |
| OpenCR1.0 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
| U2D2 | JST (3P, 4P) | Robot Cable-X4P (by length) | JST-4P | RS-485 |
" alt="人気 DYNAMIXEL XH430-W350-R">
-
商品説明・詳細
-
送料・お届け
商品情報
残り 1 点 41,492円
(115 ポイント還元!)
翌日お届け可(営業日のみ) ※一部地域を除く
お届け日: 02月13日〜指定可 (明日18:00のご注文まで)
-
 ラッピング
ラッピング
対応決済方法
- クレジットカード
-

- コンビニ前払い決済
-

- 代金引換
- 商品到着と引き換えにお支払いいただけます。 (送料を含む合計金額が¥291,583 まで対応可能)
- ペイジー前払い決済(ATM/ネットバンキング)
-
以下の金融機関のATM/ネットバンクからお支払い頂けます
みずほ銀行 、 三菱UFJ銀行 、 三井住友銀行
りそな銀行 、ゆうちょ銀行、各地方銀行 - Amazon Pay(Amazonアカウントでお支払い)
-







あなたへのおすすめ商品
あなたへのおすすめ商品をもっと見る-

【にじさんじ コスプレ 小道具 長尾景の刀 2本 模造刀 武器】
33,800円
-

199,000円
-

AUDIENT ID4 ソフトウェアバンドル付きUSBオーディオインターフェース
14,000円
-

4,999円
-

18,900円
-

【チークパッド31と35あり】SHOEI EX ZERO 純正オプションシールド
44,900円
-
TRAIL BUM トレイルバム ウォーカーシェルジャケット
39,050円
-

70,000円
-

9,000円
-

7,500円




